|
|
|
|
 | Autor: |
|
Betreff: Re: Die größte Innovation des Jahrhunderts im Bereich der RÜB-Reinigung |
Verfasst am: 22.01.2010 13:46 |
|
|
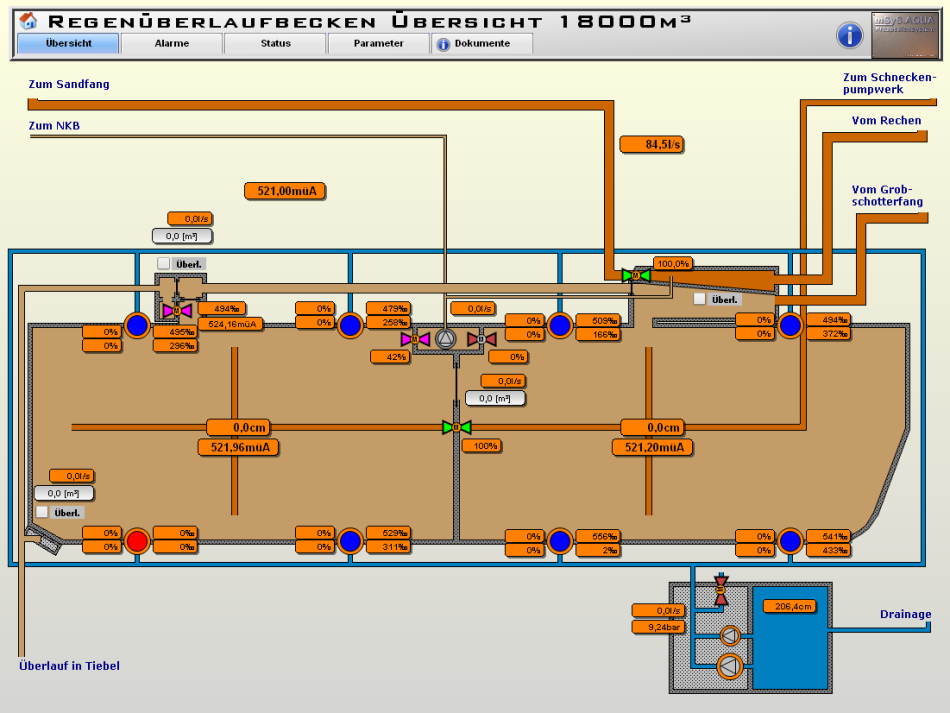
Anlage: KA Feldkirchen (50000 EW)
Nominalzufluss: ca. 100l/s
Regenwetterzufluss: bis zu über 1000 l/s
RÜB Kapazität: 18466 m³
 
Aufgrund der örtlichen Begebenheiten der Kläranlage Feldkirchen wurde ein Regenrückhaltebecken mit sehr großer Kapazität benötigt (18466 m³). Das Problem ist der ehemalige Seegrund und der hohe Grundwasserspiegel, deshalb wurden die RÜBs mit großer Fläche und geringer Tiefe gebaut.
Vor dem Umbau waren auf der Kläranlage 4 RÜBs mit einer Gesamtlänge von ca. 190 m und einer Breite von ca. 50 m, jedoch wurde für die Reinigung der 4 Becken je nach Verschmutzung 1 – 2 Tage ein Mann und ein Kanalspülwagen benötigt.
Aus diesen 4 Becken wurden nach dem Umbau 2 Becken mit senkrechten Wänden und einer Länge von je ca. 95 m, einer Breite von 46 m, und einer Tiefe von maximal 4,2 m. Durch diese Größe und die baulichen Begebenheiten war eine herkömmliche Reinigung mittels Spülkippen oder Rührwerken nicht möglich.
So wurde mit den Beteiligten - Wasserverband Ossiacher See, Rosenbauer und MSS Elektronik - ein Konzept für die Reinigung mittels der Rosenbauer Wasserwerfer entwickelt.
Das Konzept sieht vor, je Becken 4 stationäre Wasserwerfer zu montieren und über ein Nutzwasserpumpwerk die nötigen Wassermengen für die Reinigung zur Verfügung zu stellen.
Für die Steuerung der Werfer wurde folgendes verwirklicht: Handsteuerung über Steuerknüppel. Für die automatische Reinigung stehen grundsätzlich 2 Varianten zur Verfügung.
1.Koordinatenfahrt
Bei der Koordinatenfahrt wird links unten begonnen und in Abhängigkeit der eingestellten Parameter in konzentrischen Kreisen gereinigt. Die Rotations- und Elevationsbewegung erfolgt immer in den vom Werfer vorgegeben Grenzen zwischen 0 und 1000‰ .
Es wird die jeweilige Geschwindigkeit für Rotation und Elevation vorgegeben, ebenfalls die Wiederholrate der Rotationsbewegung. Die Elevationsbewegung erfolgt in ‰ Schritten nach Ablauf der Wiederholungen.
Die Strahlvorgabe erfolgt in Abhängigkeit des Elevationswertes. Es können 4 Strahlpositionen vorgegeben werden. d.h. ist Elevation kleiner als der eingestellte Wert, wird der Werfer mit dem eingestellten Strahl betrieben.
- Elevation < 250 Strahl 1 (breit)
- Elevation < 500 Strahl 2
- Elevation < 750 Strahl 3
- Elevation < 1000 Strahl 4 (voll)
Die Parameter für die Koordinatenfahrt können für Schnell- und Vollreinigung getrennt eingestellt werden.
2.Lernfahrt
Über das Leitsystem kann die Lernfahrt für die Werfer freigegeben werden.
Sobald ein Werfer mit einem der Griffe gekoppelt wurde und der Werfer aktiv ist, wird die Fahrt aufgezeichnet. Wird der Werfer wieder vom Griff entkoppelt wird die Lernfahrt abgeschlossen und in einem Datenobjekt in der SPS abgelegt.
Bei der Lernfahrt werden die Bewegung (Elevation und Rotation), die Geschwindigkeit (Elevation und Rotation), die Strahlstellung sowie der Solldruck aufgezeichnet.
Diese Aufzeichnungen erfolgen im Sekundentakt und werden dann ebenfalls so wiedergegeben.
Die Anlage ging im Sommer 2009 in Betrieb und wurde auch dieses Konzept erfolgreich umgesetzt - für die Reinigung der beiden Becken werden jetzt weniger als 3 Stunden "vollautomatisch" benötigt.
  |
| Autor: |
|
Betreff: Die größte Innovation des Jahrhunderts im Bereich der RÜB-Reinigung |
Verfasst am: 22.01.2010 13:45 |
|
|
 | Applikationsbericht Wasserverband Ossiachersee - Kläranlage Feldkirchen
Regenbecken-Reinigung |  |
|
|
|


